All-wheel Steering: ระบบบังคับเลี้ยวทั้ง 4 ล้อ
15592 จำนวนผู้เข้าชม |

ระบบ All-wheel Steering เป็นการนำระบบเลี้ยวทั้ง 4 ล้อ หวนกลับเข้าสู่วงการยานยนต์อีกครั้ง เรื่องแนวคิดไม่มีอะไรที่แตกต่างจากระบบนี้ในยุคเริ่มต้น ที่ถูกนำมาใช้งานในรถยนต์เมื่อกว่า 20 ปีที่ผ่านมา นั่นคือ “ช่วยลดรัศมีในการเลี้ยว” สร้างความสะดวกสำหรับการถอยจอดในซองแคบ ๆ ซึ่งสร้างปัญหาให้ทั้งรถสปอร์ต กลุ่มที่ใช้ระบบขับเคลื่อน AWD รวมทั้งรถลีมูซีน และ SUV ที่มีตัวถังยาวเกินกว่า 5 เมตร เป็นอย่างยิ่ง และจุดเด่นประเด็นถัดมา คือช่วยให้ล้อทั้งสี่ตั้งฉากกับผิวถนน หรือสัมผัสถนนมากที่สุดในขณะรถเข้าโค้ง
ปัญหาของระบบรูปแบบนี้ในอดีตคือ ตอบสนองไม่ทันกับอาการของรถ โดยเฉพาะในขณะเข้าโค้ง ระบบจึงไม่สร้างประโยชน์ให้เท่าที่ควร สำหรับวันนี้เรื่องการคอนโทรลไม่ใช่ปัญหาอีกต่อไป ล้อหลังของรถยนต์ยุคใหม่ที่ติดตั้ง All-wheel Steering จะควบคุมการเลี้ยวด้วยไฟฟ้าอย่างเต็มระบบ
โดยรูปแบบในการหักเลี้ยว และองศาในการหักเลี้ยว จะมาจากการประมวลผลของ ECU โดยพิจารณาจาก ความเร็วล้อ, องศาการหักเลี้ยวของพวงมาลัย, แรงเฉื่อยจากการเคลื่อนที่ และระดับการเอียงของตัวถัง
องศาในการหักเลี้ยวของล้อหลังจะอยู่ที่เพียงไม่เกิน 3 องศา สำหรับรูปแบบในการหักเลี้ยวจะมี 2 รูปแบบ ได้แก่ การเลี้ยว ‘สวนทิศทาง’ กับการเลี้ยวของล้อหน้า จะช่วยลดรัศมีของวงเลี้ยว ทำให้การควบคุมรถขณะจอดทำได้ง่ายขึ้น ทำงานที่ความเร็วไม่เกิน 35-50 กม./ชม. [แตกต่างกันตามการออกแบบืของแต่ละผู้ผลิต]
ส่วนการเลี้ยวรูปแบบที่เหลือ คือ การเลี้ยว ‘ทิศทางเดียว’ กับการเลี้ยวของล้อหน้า เหมาะกับการเลี้ยวในโค้งด้วยความเร็วสูง มุมการเลี้ยวของล้อหลังเพียงเล็กน้อย ก็สามารถช่วยให้หน้ายางสัมผัสกับผิวถนนได้มากยิ่งขึ้น

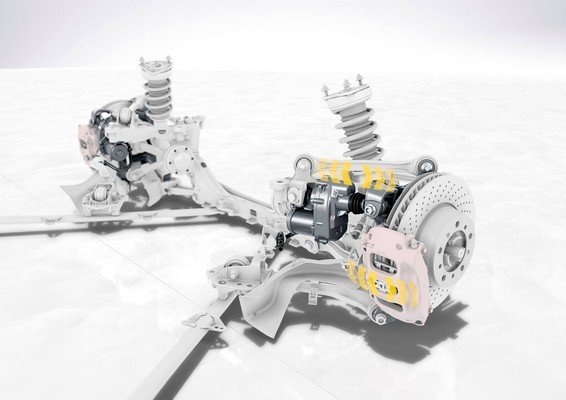
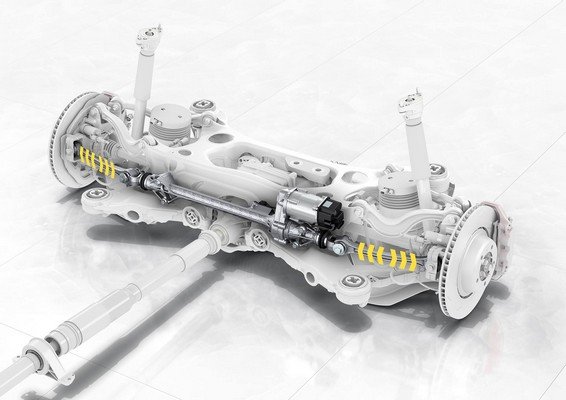
คำถามต่อมาคือ จะทำให้ล้อหลังหักเลี้ยวได้อย่างไร ถึงจะไม่ล้มเหลวเหมือนระบบรูปแบบนี้ในอดีต คำตอบ อยู่ที่ ‘การใช้ระบบไฟฟ้าควบคุมระบบกลไก’ มอเตอร์ไฟฟ้ารับหน้าที่ขยับคอม้า ให้หักเลี้ยวไปทางซ้ายหรือทางขวา ซึ่งทั้งหมด ควบคุมด้วย ECU และตอบสนองได้เร็วในหน่วยของเวลา millisecond (1/1,000 วินาที) เท่านั้น
ภาพ : PORSCHE AG
เรื่อง : Pitak Boon

")

